
Engelden Kaçan Robot Yapımı
Merhaba arkadaşlar. Bu yazımızda “Engelden Kaçan Robot nedir, nasıl yapılır?” konularından bahsedeceğiz.
Engelden Kaçan Robot Nedir?
Engelden kaçan robot,diğer adıyla engel algılayan robot, otonom olarak çevre kontrolü yapabilen ve hareketini önleyebilecek cisimleri atlatabilen robot tipidir. Çevre kontrolünü sağlayabilmesi için ultrasonik, kızılötesi vb. gibi çeşitli sensörlere ihtiyaç duyar.
Arduino ile Engelden Kaçan Robot Yapımı
Ultrasonik sensör ile karşılaştığımız engelleri algılayıp buna göre yön değiştiren bir robot yapacağız. Robotumuzun hızını ve yönünü bir motor sürücü ile kontrol edeceğiz. Gelin önce malzemelere göz atalım.
Gerekli Malzemeler
- Arduino Uno
- Çok Amaçlı Robot Platformu
- L298N Voltaj Regulatörlü Çift Motor Sürücü Kartı
- HC-SR04 Ultrasonik Mesafe Sensörü
- Pil ( Alkalin piller robotu yaklaşık 15 dk. verimli şekilde çalıştıracaktır. Li-Po pil kullanmanız robotu daha uzun süre ve daha verimli çalıştıracaktır.)
- 6’lı AA Pil Yuvası
- Jumper
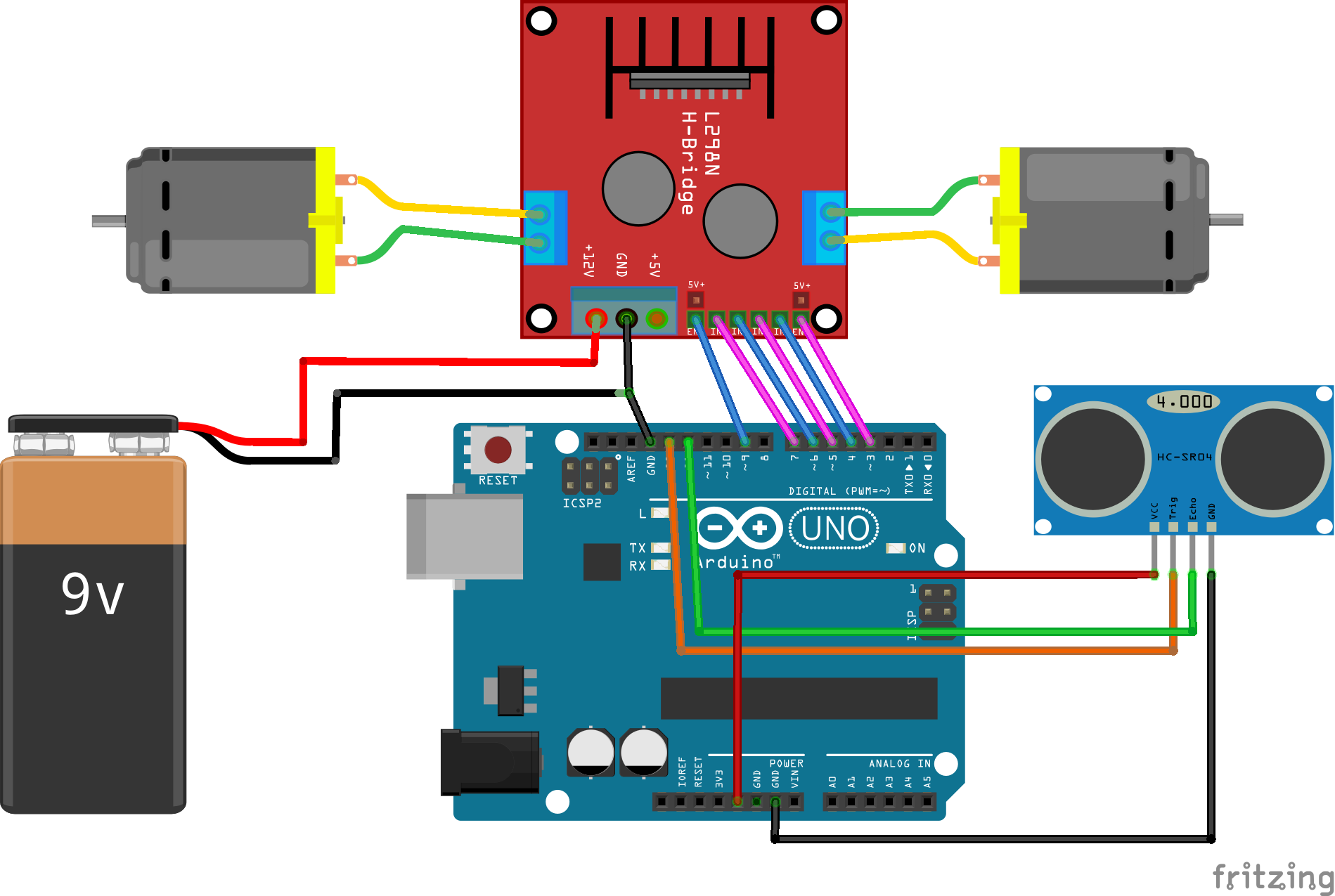
Engelden Kaçan Robot Devresi
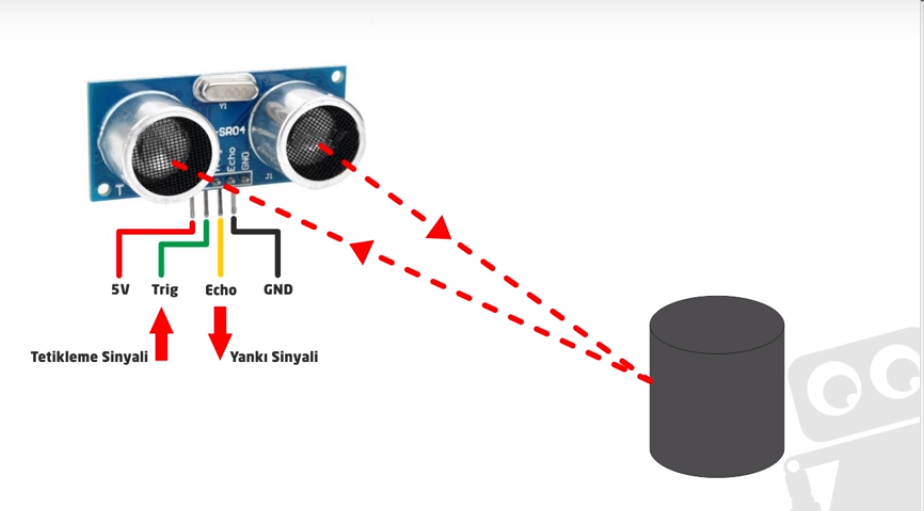
Ultrasonik Sensörün Çalışma Prensibi
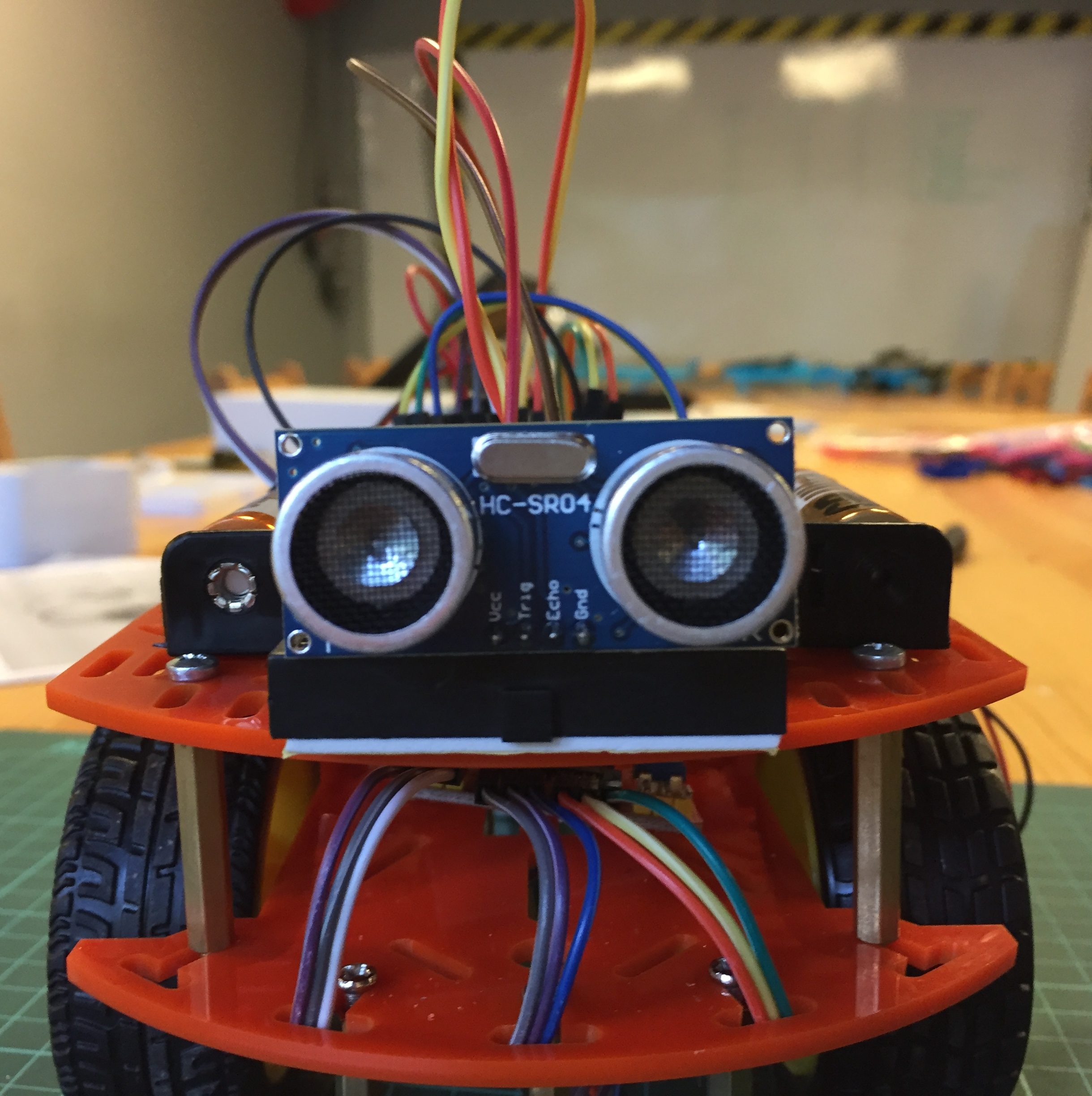
Robotun Gövdesi
Projemizin son hali şekilde gibidir.
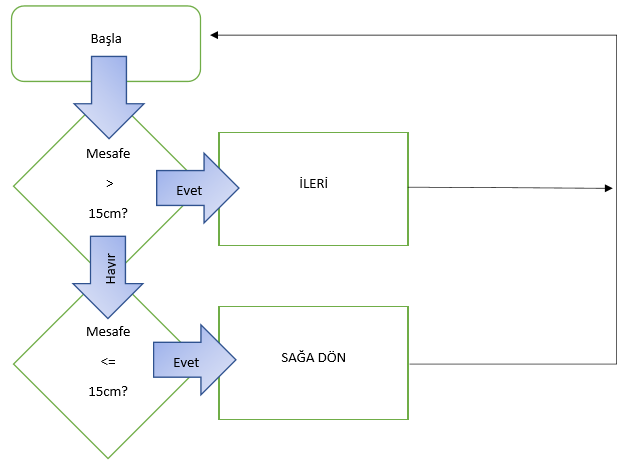
Algoritma
Robotumuzu kodlamaya başlamadan önce hangi işlemleri takip edeceğimizi bilmemiz gerekiyor. Temel amacımız robotun bir engele takılmaması olacaktır. Örnek olarak geniş bir zeminde engelle karşılaştığında sağ yöne hamle yapan bir robotun temel algoritmasını göstermek istiyorum :
Bu algoritmayı Arduino’da yazalım ?
Arduino Kodları
#define echoPin 12 //Ultrasonik sensörün echo pini Arduino'nun 12.pinine
#define trigPin 13 //Ultrasonik sensörün trig pini Arduino'nun 13.pinine tanımlandı.
#define MotorR1 7
#define MotorR2 6
#define MotorRE 9 // Motor pinlerini tanımlıyoruz.
#define MotorL1 5
#define MotorL2 4
#define MotorLE 3
long sure, uzaklik; //süre ve uzaklık diye iki değişken tanımlıyoruz.
void setup() {
// ultrasonik sensör Trig pininden ses dalgaları gönderdiği için OUTPUT (Çıkış),
// bu dalgaları Echo pini ile geri aldığı için INPUT (Giriş) olarak tanımlanır.
pinMode(echoPin, INPUT);
pinMode(trigPin, OUTPUT);
pinMode(MotorL1, OUTPUT);
pinMode(MotorL2, OUTPUT);
pinMode(MotorLE, OUTPUT); //Motorlarımızı çıkış olarak tanımlıyoruz.
pinMode(MotorR1, OUTPUT);
pinMode(MotorR2, OUTPUT);
pinMode(MotorRE, OUTPUT);
Serial.begin(9600);
}
void loop() {
digitalWrite(trigPin, LOW); //sensör pasif hale getirildi
delayMicroseconds(5);
digitalWrite(trigPin, HIGH); //Sensore ses dalgasının üretmesi için emir verildi
delayMicroseconds(10);
digitalWrite(trigPin, LOW); //Yeni dalgaların üretilmemesi için trig pini LOW konumuna getirildi
sure = pulseIn(echoPin, HIGH); //ses dalgasının geri dönmesi için geçen sure ölçülüyor
uzaklik = sure / 29.1 / 2; //ölçülen süre uzaklığa çevriliyor
Serial.println(uzaklik);
if (uzaklik < 15) // Uzaklık 15'den küçük ise,
{
go_backward(); // 150 ms geri git
delay(150);
turn_right(); // 250 ms sağa dön
delay(250);
}
else { // değil ise,
go_forward(); // ileri git
}
}
void motor_left(String dir, int spd) // sol motor kontrolü
{ // yön(dir) ve hız(spd) için değişkenler.
if ( dir == "FORWARD") // FORWARD komutu ileri hareket için.
{
digitalWrite(MotorL1, LOW);
digitalWrite(MotorL2, HIGH);
analogWrite(MotorLE, spd);
}
if ( dir == "BACKWARD") //BACKWARD komutu geriye hareket için.
{
digitalWrite(MotorL1, HIGH);
digitalWrite(MotorL2, LOW);
analogWrite(MotorLE, spd);
}
}
void motor_right(String dir, int spd)// sağ motor kontrolü
{ // yön(dir) ve hız(spd) için değişkenler.
if ( dir == "FORWARD") // FORWARD komutu ileri hareket için.
{
digitalWrite(MotorR1, HIGH);
digitalWrite(MotorR2, LOW);
analogWrite(MotorRE, spd);
}
if ( dir == "BACKWARD") //BACKWARD komutu geriye hareket için.
{
digitalWrite(MotorR1, LOW);
digitalWrite(MotorR2, HIGH);
analogWrite(MotorRE, spd);
}
}
void go_forward() // Robot ileri gitsin.
{
motor_right("FORWARD", 200); // Sağ ve sol motorlar ileri yönde 200 hızında
motor_left("FORWARD", 200);
}
void turn_right() // Robot sağa dönsün.
{
motor_right("BACKWARD", 200); //Sağ motor 200 hızında geri
motor_left("FORWARD", 200); //Sol motor 200 hızında ileri
}
void go_backward() // Robot geri gitsin.
{
motor_right("BACKWARD", 200); //Sağ motor 200 hızında geri
motor_left("BACKWARD", 200); //Sol motor 200 hızında geri
}